ELEVATED ROBOTICS
I was the System Integration Engineer for the team Elevated Robotics: a small start-up company that was started as part of a Capstone at Texas A&M University. I successfully designed, developed, and delivered the Aerial Surveillance Vehicle System while using project management tools. We, Elevated Robotics is pleased to present the Aerial Surveillance Vehicle System (ASV) project. This project is co-sponsored by Matt Leonard of TSTAR, and Joel Krouse of iCaelus. The sponsors for this project desired a portable module that would be adaptable to any multi-rotor copter, provided it had the required payload capacity.
The ASV System itself was to consist of a sensor suite for the purpose of monitoring the health and status of the vehicle, a camera for the purpose of live-streaming video with the system, and a 4G LTE connection on the public safety band. The hexacopter and the flight control board that were purchased for the purpose of demonstrating the functionality of the system are not considered a part of the ASV System module that was created by Elevated Robotics.

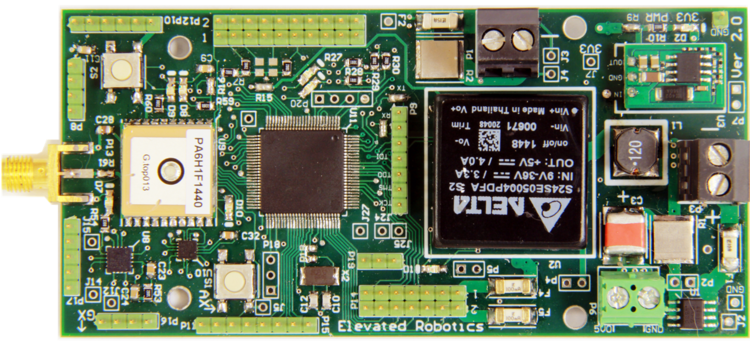
ASV BETA BOARD
The ASV System Beta Board was the final iteration of the board developed as part of my team's deliverable. The Aerial Surveillance Vehicle (ASV) System Main Board seen here has several functions in the overall system. The functions include: a communication link between the BBB and the flight control unit, the distribution of processing power, power support for 5V systems, health monitoring of ASV with the use of sensors, and the control unit for the flight control board. Overall the main purpose of all of the above is for the ASV system to be adaptable to most Aerial systems by providing its own power, control and communications infrastructure.
ASV FIRST FLIGHT
Elevated Robotics presents the first flight of the Aerial Surveillance Vehicle. In its final implementation, the ASV System will be used to provide a live video feed of potentially dangerous environments from the air to a user located at a safe distance. It will be field deployable and operate at low altitude during daytime and clear weather conditions. The ASV must be simple to operate and rugged enough to handle rough treatment by the operator.